行星差动减速机正是在这样的需求背景下走上舞台。它并非简单的减速器,而是将行星齿轮组的高承载能力与差动机构的灵活调速巧妙结合的一体化解决方案。要理解其魅力,首先要从结构与原理讲起。
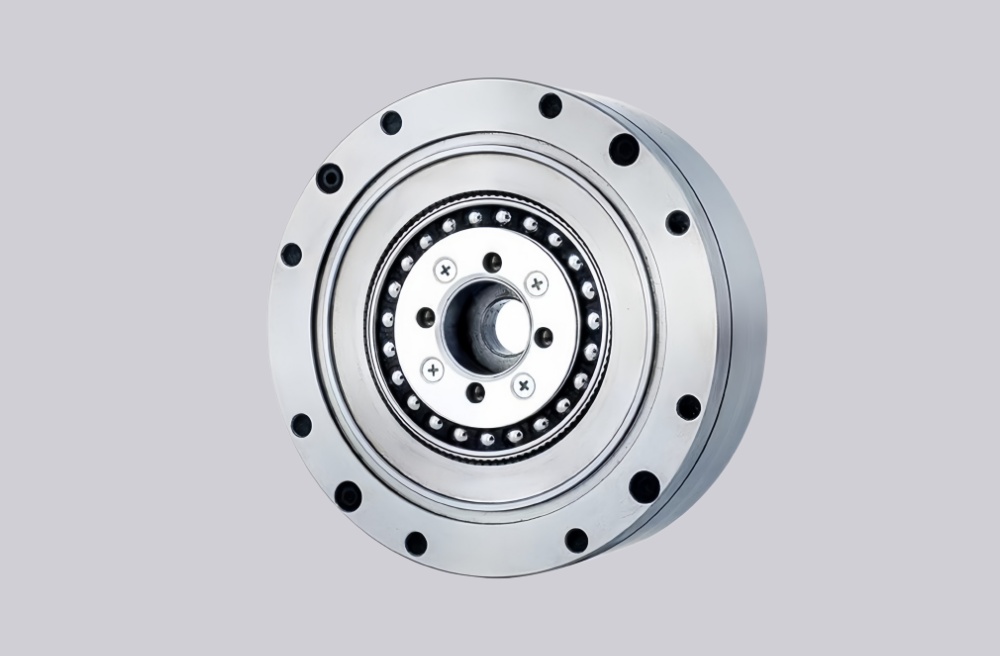
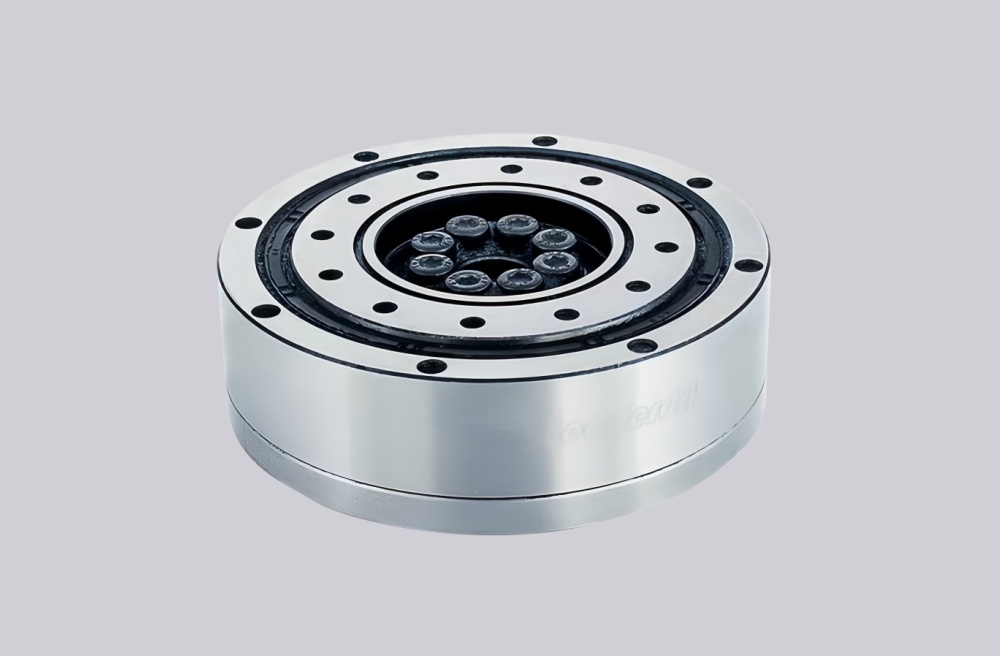
核心结构仍然以行星齿轮为骨架:中心的太阳轮驱动,若干行星轮围绕太阳轮作公转,行星轮由一个载体(行星架)承载,外圈则通常是内齿环。这个基础的行星齿轮组被设计成高强度、低背隙的紧凑单元,是实现大扭矩、低回程误差的关键。不同于传统单一输出的减速机,行星差动减速机在行星齿轮组的基础上引入差动机构,使输出轴的转速和扭矩关系具备更灵活的分配能力。
差动机构常以额外的齿轮对或小型行星组的形式嵌入,负责将输入端的动力分配到两个或多个输出轴上,并通过锁止、自由差动等状态实现同步或可控的差速。
工作原理的核心在于两个层面的协同:第一层是行星齿轮系的自然减速特性。太阳轮的转速决定了整个齿轮组的传动比,行星轮在环形齿圈内与太阳轮啮合,承载来自输入端的扭矩,并通过行星架将力矩传递给输出端。第二层是差动机构的分配逻辑。通过差动结构,机械传递路径可以将减速后的动力分配到两个输出轴,且在设计范围内实现两轴之间的同步或有控制的速比差。
这意味着同一输入马达就能同时驱动两个联动轴,且在负载不对称的场景下仍能保持较高的传动效率与稳定性。
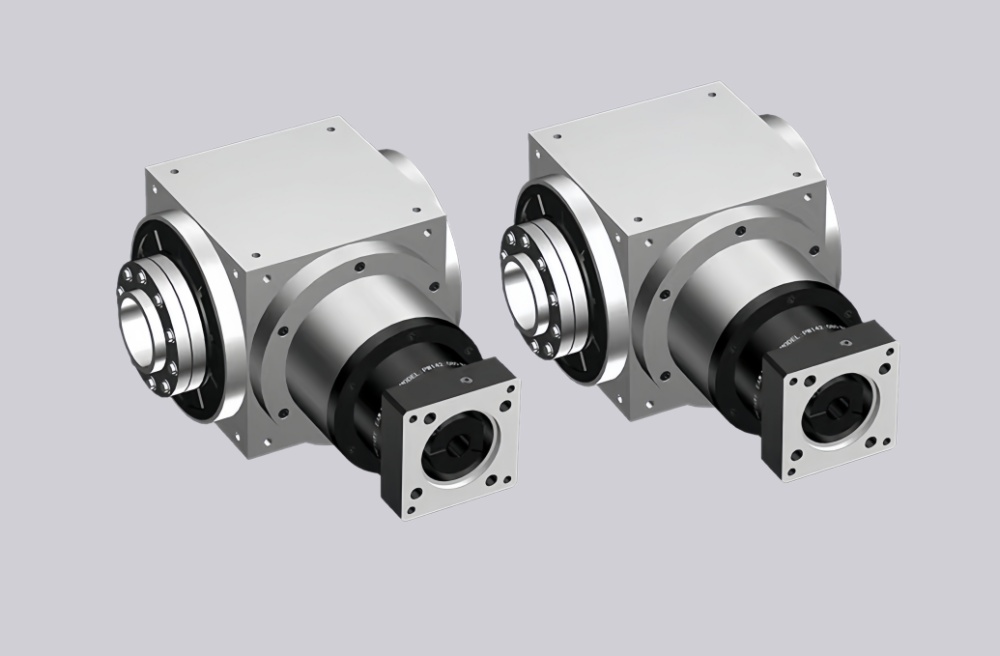
表面看,差动可能带来额外的体积与成本,但在高端应用中,它换来的是更强的扭矩承载、刚性和容错性。行星差动减速机的这套组合具备以下优点:高扭矩密度,单位体积内承受的扭矩远超同等重量的传统减速器;低背隙、优良的刚性,有效保障定位精度与重复性;短小的传动链路,便于在机器人关节、精密夹具、伺服驱动的紧凑空间内实现多轴协同;良好的热管理和润滑系统设计,使长期运行中热涨冷缩对精度的影响降到最低;以及高度的模块化与可自定义性,方便根据不同工艺需求进行定制化配置。
制造层面的要点包括材料强度与疲劳性能、表面硬化处理、润滑油路设计、背隙控制策略、热膨胀匹配等,这些都直接决定着设备的寿命、可靠性和维护成本。
在控制层面,行星差动减速机通常需要与高精度伺服驱动、编码器反馈及适配的控制算法协同工作。因具备两输出轴,控制系统可以通过闭环控制实现对两轴的共轨姿态与同步速度的精确维持,甚至在某些场景中通过差动角度的微调实现对负载不对称的自适应分担。这意味着在自动化产线、机器人关节和精密夹具等场景中,单一驱动单元就能承担多轴协同的传动任务,有效降低系统复杂性、减少外部联动件与安装空间,同时提升装置的响应速度与鲁棒性。
从应用趋势看,行星差动减速机更易嫁接到智能化控制系统之中。通过集成的传感器、润滑监控、温度感知以及状态自诊断模块,它能够持续输出健康信号,帮助运维人员提前发现异常并预防性维护。企业在升级产线时,可以把这类减速机作为核心驱动单元,与柔性制造、机器人端执行机构以及分拣与包装系统深度整合。
由此带来的收益不仅仅是产线吞吐量和定位精度的提升,更包括对生产波动的适应性增强、设备可维护性提升以及总体拥有成本的下降。行星差动减速机以其独特的结构优势和前瞻性的控制方案,为现代工业自动化提供了一个高效、可靠、灵活的传动解决方案,成为许多高端应用的新标配。
案例一:机器人关节与多轴协同的高效驱动在一款面向装配线的六轴机器人中,设计师选用一套带差动输出的行星减速单元来实现两个相邻关节的协同驱动。输入端马达驱动太阳轮,差动机构将动力在两轴之间分配,确保在并联运动时仍能保持严格的同步性。结果是:减少了传动连杆数量,降低了系统重量与体积,同时提升了关节运动的平顺性和重复定位精度。
由于整套单元内置的热管理与润滑系统,机器人在连续作业下的热偏移和背隙漂移显著降低,维护间隔也随之延长。这一方案在电子组装、精密涂胶、微小部件的拾取与放置等环节表现尤为出色,成为提升产线柔性与产能的关键模块。
案例二:双通道分拣与并行输送的协同驱动在快件分拣与包装行业,一条生产线需要两条并行输送带或两组抓取单元实现同步作业。传统做法往往需要两套驱动系统,增加成本与占用空间。采用带差动的行星减速机,单一输入源即可驱动两条通道,且通过差动输出实现两通道速比的可控差异或完全同步。
系统通过闭环控制对两条通道的线速度进行协同调度,提升分拣效率的同时降低对操作人员的干扰,减少正反向冲击带来的磨损。该方案的优势在于结构简化、占地缩小、能耗下降,以及对线性速度变化具有更高的鲁棒性。
案例三:高精度数控机床的主轴辅助驱动在高端数控加工中,主轴之外还需要若干定位与进给轴实现快速、稳定的加工路径。利用行星差动减速机的多轴输出能力,可以把若干伺服驱动轴与主轴协同工作,实现高强度的扭矩输出和极低的背隙。通过对两输出轴的同向锁定或微量差速控制,加工中的刀具路径经受力矩波动的影响更小,定位误差与重复误差得到显著压缩。
这种配置尤其适用于复杂轮廓加工、微米级定位以及高稳定性需求的模具制造场景。更重要的是,系统的模块化设计便于后续扩展与维护,减小了整机的停机时间。
案例四:智能自动导引车(AGV)的驱动与稳定性优化在仓储与物流领域,AGV的驱动系统对整车的稳定性和能耗具有直接影响。将行星差动减速机应用在驱动轮组上,可以实现一个马达驱动多轮同时受控,且通过差动机制实现对轮速不对称载荷的自我分担。这有助于提升车轮在湿滑、坡道或不平整地面上的抓地力与通过性,同时降低因单轮受力不均引发的轮毂磨损和热累积。
结合车载传感与云端监控,驱动单元还能提供状态诊断、温度监控和保养预测,确保AGV系统在高强度作业环境中的可靠性与可用性。
案例五:柔性带式生产线的同步驱动与故障容错在柔性制造场景,生产线经常需要切换工艺、换线快速。此时,行星差动减速机的双输出结构可以为两条并行传动带提供可控的速度比与同步性。若一个通道出现临时故障,系统通过差动机制实现对另一个通道的自适应补偿,确保关键工序的执行不被打断,缩短停机时间。
通过与传感网络和预测性维护结合,这类驱动单元成为实现“生产即服务”理念的核心组件之一。
总结行星差动减速机在原理层面的优势与在应用场景中的灵活性,正逐步改变工业自动化对传动系统的认知。它不仅仅是一枚高效的驱动器,更是一条通向高产能、低成本、可持续升级的智能化传动通道。对于企业而言,选择合适的行星差动减速机,意味着在保证性能的前提下,显著降低系统复杂度、缩短研发周期、提升维护效率。
未来,随着材料科技、润滑体系与控制算法的持续进步,该类传动单元将更多地融入到机器人同行、智能制造与物联网协同的关键环节,成为推动行业升级的中坚力量。若您正在规划新产线或升级现有设备,建议把“行星差动减速机”列为核心设计选项之一,通过定制化解决方案实现更高的生产力与更低的全生命周期成本。
美卡普减速机
电话微信:+86 158-5032-2957