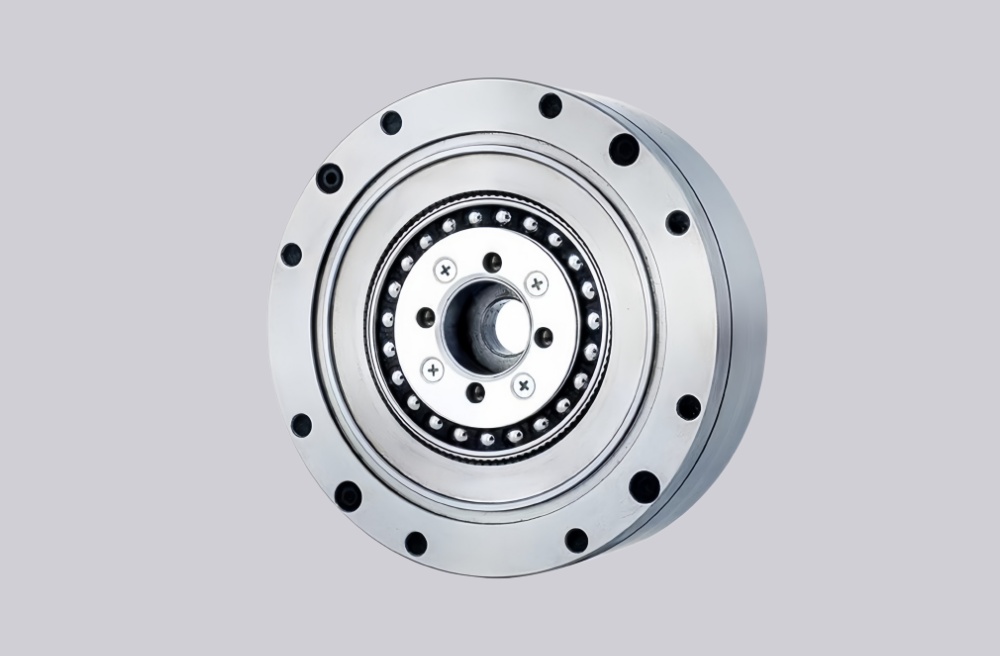
高性能表现与机理在高速高精度应用中,伺服行星齿轮减速机成为核心传动元件。它以紧凑的体积、出色的扭矩密度和极低的背隙,帮助系统在短时间内完成高加速度定位,并保持高刚性与重复定位精度。其核心优势在于“等速-均衡-传动结构”使输出端具备较高的刚性模态与稳定的减速比,能够在较广工况区间内维持线性扭矩传递。
比如在高速伺服搬运、CNC铣削或精密点胶场景,减速机的背隙、啮合误差和轴向波动直接转化为位置误差、速度抖动与振动噪声。
背隙是评价精度的第一指标。高精度等级的背隙通常在几角分到1角分量级,且随润滑状态与制造公差优化而波动。低背隙带来更小的静态定位误差与更快的响应,特别是在反向切换和微小位移控制中表现显著。扭矩刚性与等效惯性比决定了对驱动器的响应能力与控制稳定性。
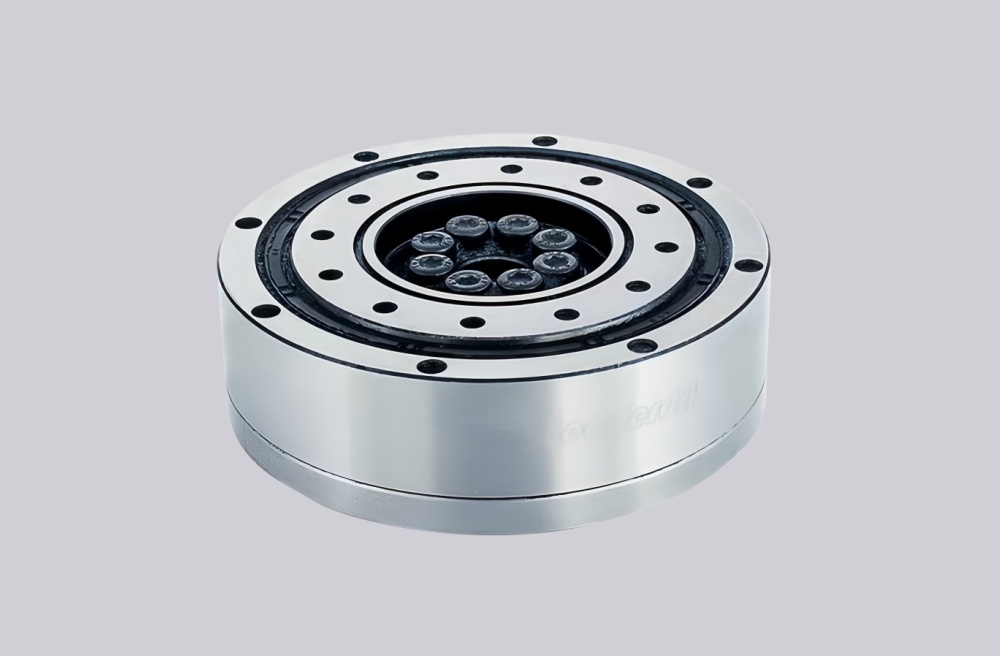
输出端的角度刚性越高,系统越不易受加减速引起的共振影响;同时高刚性提升重复定位能力,减少热变形对位移的影响。传动效率方面,伺服行星齿轮在良好润滑条件下可达到较高水平,常见有效传动效率约在90%-98%之间,具体取决于级数、齿轮设计、润滑油品和载荷角度。
对于高速应用,损耗来源包括齿轮啮合间隙、滚动摩擦、轴承摩擦及润滑黏度带来的流体阻力;通过优化啮合角、选用优质材料与涂层、改进油路设计,可将温升控制在可接受范围,从而稳定载荷能力与精度。
在动态特性方面,伺服行星减速机需具备较高的扭矩带宽与良好阻尼。动态响应包含上升时间、超调与输出抖动等指标。高带宽意味着驱动系统在执行复杂轨迹时更能准确追踪目标。为抑制最近轴承与齿轮本体的共振,通常通过结构优化、材料刚性提升、润滑油黏度与温度控制等手段实现。
在高速工作条件下,噪声与振动的传播路径也需关注。通过对减速机两端轴的对中、支撑刚性及耦合件质量分布的优化,可以缩短传递链自由度,降低振动放大效应。
热管理与寿命也是不可忽视的维度。高速作业带来较高热输入,热膨胀会改变啮合状态、额定扭矩和背隙,影响定位精度与重复性。因此,伺服齿轮减速机通常采用高效润滑系统、密封结构和散热设计。热管理不仅关系到寿命,也关系到安全边界:温升过高可能导致润滑失效、轴承疲劳与微观裂纹扩散。
设计阶段需进行热-力耦合仿真,预测不同工况下的温升曲线,并据此安排散热片、风道、液冷通道或外部冷却系统。
整机调试被视为关键环节。即使单件部件性能出色,系统集成后也需通过调试提升整体表现。调试要点包括对背隙分项检测、齿轮啮合偏心的对中度量、润滑状态监测,以及伺服驱动对齿轮端的扭矩分布与热态反馈。现代伺服系统提供齿轮箱状态监测接口,允许在运行时通过温度、振动、油压、齿轮啮合角等信号进行自适应调整。
闭环管理使重复定位更稳定、速度抖动更低、长期可靠性更高。
本部分所覆盖的要点共同构建了高速高精度场景下的性能底座:高背隙控制、高刚性传动、优越热管理与系统级调试,都是实现高精度与高产能的必要条件。聪明的机械设计与精准的工艺制造相互印证,才能让伺服行星齿轮减速机在复杂工况中发挥稳定、可预测的表现。随着材料科技、润滑学和数字化监测的发展,未来的齿轮箱将具备更高的自诊断能力、更低的能耗以及更小的体积,从而在极端高速和超高精度场景中成为不可替代的核心动力。
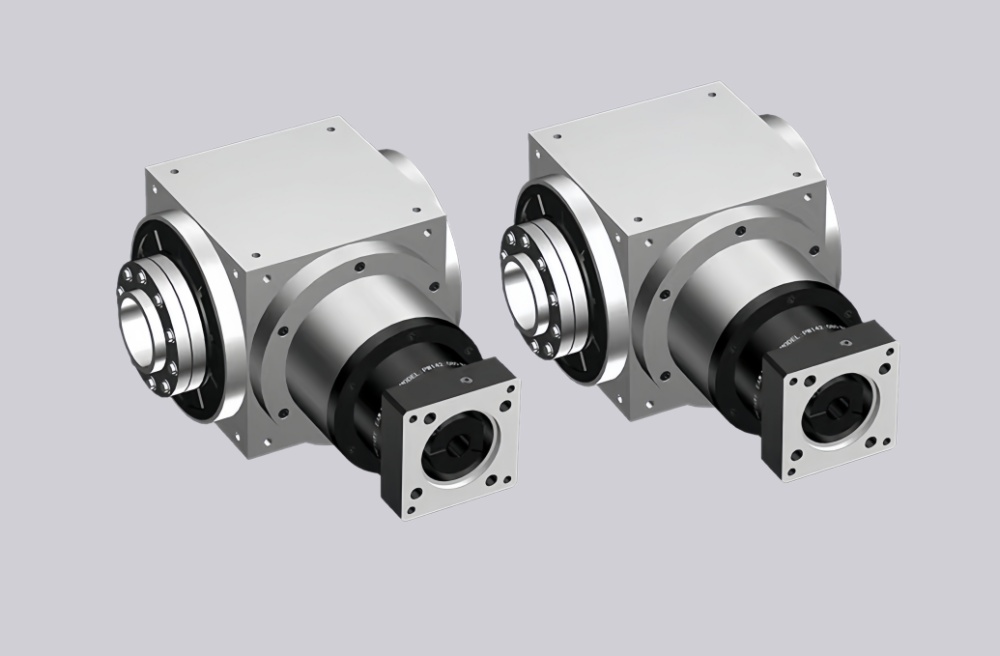
驱动系统集成优化方案在高速高精度场景中,单纯依赖齿轮箱的性能并不能完全满足需求。真正的竞争来自于驱动系统与减速机的协同优化——包括机械连接、电子控制、热管理与维护策略。下面给出一个系统化的集成方案,帮助工程师在选型、布线、调试和运行维护中实现最优结果。
一、机械耦合与惯性匹配
选取合适的减速比和级数,确保驱动端电机的转动惯量与减速机输出惯性之间的比值在合理范围,常见目标是在1:2到1:6之间的等效传动比区间,使控制环路更易稳定、减少扭矩冲击对负载的影响。使用高刚性耦合件,避免端部弹性引入的相位误差;输出端安装面要严格对中,确保力矩传递的直线性。
引入必要的被动或主动减振件,降低高速齿啮合产生的转动振动对工艺路径的干扰。
二、电子控制与驱动策略
选用高分辨率编码器的伺服电机或高精度编码器,提升闭环控制精度。若情境允许,可采用直接位置控制、速度前馈和扭矩前馈相结合的策略,显著降低定位误差和相位滞后。采用场景适配的控制算法:对于高刚性结构,使用位置/速度闭环并行控制,结合噪声抑制和抗共振策略;对于极高速轨迹,嵌入前馈以提升响应速度,避免拖尾误差。
通过对齿轮啮合的细粒度监控,实施齿轮与润滑状态的自诊断。若温升异常或油膜不足,驱动系统可自动调整输出扭矩或触发维护提醒,保障稳定性。确保电缆与连接的简洁性,降低EMI影响。对传感器布线分组、屏蔽与合理布线,保证控制信号干净一致。
三、热管理与润滑优化
高速操作的热量通过齿轮箱、电机与驱动器三点系统叠加传导,需要统一热管理策略。对齿轮箱设立冷却通道与油循环,确保齿轮啮合区温度控制在额定范围;对电机采用端盖散热、风冷或液冷组合,使绕组温升维持在安全值。选择合适润滑油黏度与润滑方式(油润、脂润、混合润滑),并定期进行油品检测与更换。
润滑状态直接影响啮合效率、噪音水平和磨损速率,应作为日常监控对象。
四、路径规划与系统调试
调试阶段建立从模型到实测的闭环验证,对比理论路径、惯性参数与实际轨迹,快速定位偏差来源并据此调参。提前完成对中测量,确保电机、减速箱与输出轴同心度与垂直度达到设计指标。对绕组温度、油温、轴承振动等进行综合监控,避免热涨引发性能下降。建立标准化测试集,覆盖静态定位到高速连续运行的各工况,记录背隙、扭矩波动、振动、噪声、热升等指标,为后续迭代提供依据。
五、应用案例与落地实践
高速行业案例:在高速分拣、装配线、激光加工中,采用伺服行星减速机实现高加速、低抖动、稳定重复定位;通过驱动参数精细调试,定位误差可控在微米级范围,生产节拍显著提升。机器人关节与柔性制造:模块化设计将减速机、编码器、电机、制动器等模块组合,支持快速切换与换线,降低调试成本,提高系统可维护性。
半导体封装与探针设备:多轴联动优化降低能耗、缩短加工周期,提升产线稳定性。
六、实施路线与评价指标
项目前期明确性能目标、选型约束与成本权衡;设计阶段进行多物理场仿真(热-力-振动耦合),确保在目标工况下的可制造性与可靠性。交付后设定关键性能指标(KPI):定位精度、重复定位误差、最大速度、振动指标、热升、能耗与故障率,定期回顾与优化。
建议建立与维护团队的协同机制,定期现场复核、数据分析与升级验证,确保系统长期保持高性能。
美卡普减速机
电话微信:+86 158-5032-2957