行星减速机的结构与工作原理行星减速机的核心在于三件“齿形伙伴”与一个承载结构的协同工作:太阳轮、行星轮组和环形齿轮,以及承载着多颗行星轮的载体。当电机输入扭矩时,太阳轮通常被作为输入轮,而环形齿轮则可以被固定、同样也可作为输入端之一,载体承担将多颗行星轮的转动与轨道运动交汇的任务。
这种紧凑的几何组合,使得同一个齿轮组在不同的固定端与输入端配置下,能够实现不同方向的转速和扭矩变换,具备高扭矩密度和很好的传动平滑性。
啮合原理的关键在于三者之间的滚动接触和相对运动的约束。行星轮同时与太阳轮啮合,又与环形齿圈啮合;在理论上,若将环形齿圈固定,太阳轮输入、载体输出,系统的运动学关系就形成了一个固定环形齿圈、自由转动的载体与转动的太阳轮之间的相互约束。通过这组啮合关系,输入的转速被分配到载体上,且输出转速会显著低于输入转速,从而获得较大的转矩放大效应。
这也是行星减速机被广泛采用的根本原因之一——在同等体积内,能够提供更高的传动比和更均匀的载荷分布。
自由度与载荷分配的特性也值得关注。若把环形齿圈设为固定,且输入端为太阳轮、输出端为载体,则系统自由度通常为1,可以用单一变量来描述整个运动状态。这种单自由度的特性,使得减速器具有良好的机电耦合性与控制简化性。在实际应用中,设计师会通过选择合适的齿数比(太阳轮齿数S、环形齿圈齿数R、以及事先设定的载体齿轮数P)来达到期望的传动比与载荷能力。
典型关系是,当太阳轮输入、环形齿圈固定时,载体转速比约为wC=wS×(S/(S R)),理论上可实现较高的扭矩放大;若把载体作为输入端,固定太阳轮或环形齿圈,则转速与扭矩的分配会呈现不同的比例关系。不同的端点固定与输入组合,决定了最终的传动比、输出转速及输出扭矩的大小与方向。
这也是为什么同一组齿轮在不同工况下可以扮演“减速器、增速器或两端均衡”的角色。
行星减速机的结构优势不仅来自齿轮组的组合,还包括多颗行星轮的并联传动特性。多颗行星轮共同承担载荷,使得单位接触点的载荷下降,提升了承载能力与疲劳寿命;行星轮的分布式啮合使得传动过程中的噪声与振动相比单一齿轮系更易被分散,从而实现更平稳的扭矩传递。
这也是机械制造领域对它青睐有加的原因之一:在同等弹性与刚性需求下,体积更小、重量更轻、传动效率与热稳定性更好。对选型者而言,理解齿数对、相对固定端与输入端的组合,能够直接影响到最终设备的工作特性与控制策略。
润滑与背隙管理在实际应用中也极为关键。由于多对齿面同时参与传动,润滑油的粘度选择、润滑方式(油浴、强制循环、边界润滑等)以及背隙控制,都会直接影响到传动效率、热量积累以及寿命。高精度应用往往需要分级润滑或专用润滑脂,以确保在高频繁启停和高载荷工况下,齿面保持稳定的接触状态,避免早期磨损。
行星减速机的结构设计,是一门在紧凑性、承载能力与效率之间不断权衡的艺术,理解基础结构和啮合原理,是后续深入理解动力传递与实际应用的前提。
从动力传递到实际应用的实现与案例把注意力回到动力传递过程,我们看到输入端的扭矩经由齿轮啮合逐级传递至载体,再由载体输出为所需的转速与扭矩。这个过程中,传动比、载荷分配、摩擦损耗、热量产生与振动噪声共同构成了行星减速机的实际性能。
若环形齿圈被固定、太阳轮作为输入、载体作为输出,系统中的传动比往往较大,输出转矩显著提升,但需承受来自输入端的高扭矩传递时产生的热量与振动。相对地,如果将载体作为输入、固定太阳轮,那么输出转速会增大、扭矩相对较小,适用于需要更快运动的场景。通过合理的配置,工程师可以在一个齿轮组中实现多种工作模式,从而减少系统部件数量、缩短体积与重量,对成本与控制复杂性也有正向影响。
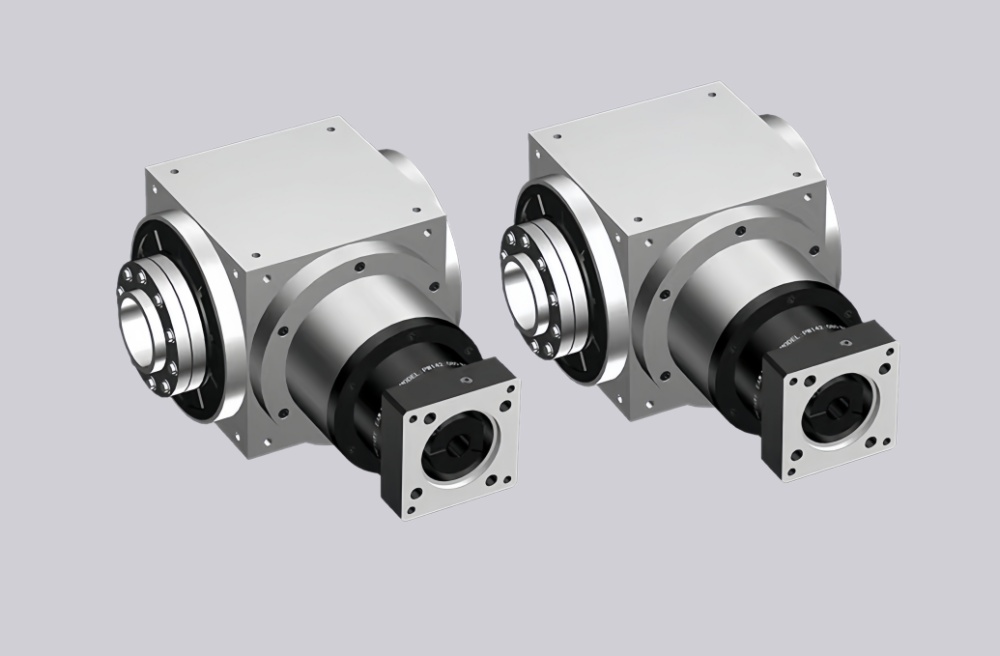
在实际应用中,单级行星减速机往往难以同时满足极端高扭矩与极低速的要求,此时多级或复合型结构成为主流。两级甚至多级的行星减速器(常见为两级或三阶段)通过串联的方式实现更高的传动比,同时将每阶段的载荷分散到不同的行星轮组上,进一步降低局部磨损、提升可靠性。
除了结构上的进阶,材料选择、热管理、密封性与润滑系统也是影响应用成败的关键因素。对高速、高温环境,需要具备高温润滑与良好热扩散性的设计;对粉尘、湿气或腐蚀性介质环境,则需要更严格的密封和防护等级。
面向实际市场,行星减速机的应用场景极广。机器人关节与执行机构中,伺服电机通常通过行星减速机实现高力矩输出、低速精确定位,配合高刚性驱动和低背隙设计,能够提供平滑的惯性响应与重复性。数控机床的主轴与进给系统,也广泛采用行星减速结构,以保证高扭矩输出与稳定的热状态,从而提升加工精度与表面质量。
在汽车领域,自动变速器里的行星齿轮组承担着关键的扭矩转换任务;而在航空航天与工业自动化等领域,紧凑高效的传动解决方案更是核心竞争力。
在选型与设计时,需关注以下要点:传动比与输出扭矩的需求、输入端与输出端的相对固定关系、载荷类型(径向、轴向、冲击负载)、精度与背隙要求、工作环境的温度、润滑条件及密封等级。若需要高精度与低噪音,可能需要采用更高精度的加工、公差控制及更优的润滑体系;若环境复杂,则需考虑防尘、防水和耐腐蚀设计。
对企业而言,短周期的开发和稳定性之间的平衡至关重要:快速原型验证、可靠性测试、热管理评估和寿命分析都是不可或缺的步骤。
实际案例层面,可以看到两类典型的应用策略。一是对高动态性的负载,采用两级行星减速机,以实现较高的传动比和较低的背隙,同时保持扭矩密度与响应速度的平衡;二是对体积和重量敏感的场景,选择紧凑型单级或轻量化的复合结构,通过优化齿形、选用高强度材料与改进润滑系统,达到同等载荷下更优的热稳定性与耐久性。
无论是机器人手臂的关节动作、还是高精密机床的进给运动,行星减速机都展示了其在力矩放大、速度控制、可靠性与经济性之间的综合优势。
如果你正在进行设备选型或系统整合,可以把目标传动比、所需输出扭矩、工作环境及寿命需求等要点整理成清单。结合具体齿数、材料、润滑方式和密封等级,咨询专业厂商的技术方案,可以快速得到适配你场景的高效解决方案。总体而言,行星减速机以其高扭矩密度、良好的载荷分配和紧凑结构,在现代机械传动系统中扮演着不可替代的角色。
希望本文对你理解其原理、把握动力传递过程以及进行实际应用选型有所帮助。如果你需要更具体的参数对比或定制化方案,我们可以一起梳理你的工况,给出针对性的建议与设计要点。
美卡普减速机
电话微信:+86 158-5032-2957