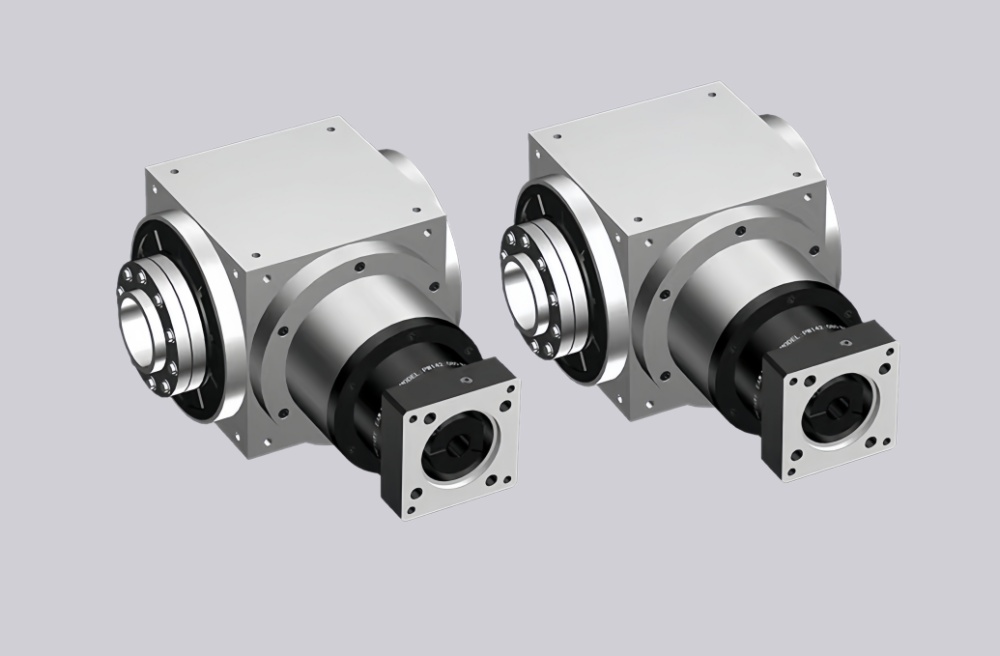
两者的有机组合,如同把“速度的锐利”与“力矩的刚性”融为一体,形成一个既能快速跟踪目标又能抗扰动的驱动单元。系统设计者需要从整个传动链条出发,关注输出轴的力学刚性、支撑结构的共振点、以及负载的惯量分布,这些因素都会在控制环路中以不同的方式体现。
只有在设计初期就把耦合关系清晰化,才能把后续的调试工作降到最低。
实际设计中,需要用系统级的指标来评估:负载惯量、允许的加速度、可接受的热升温,以及期望的定位精度。通过数学建模和仿真,可以找到一个“最佳区间”,使伺服电机的速度极限与减速机的机械刚性形成互补,而不是互相掣肘。
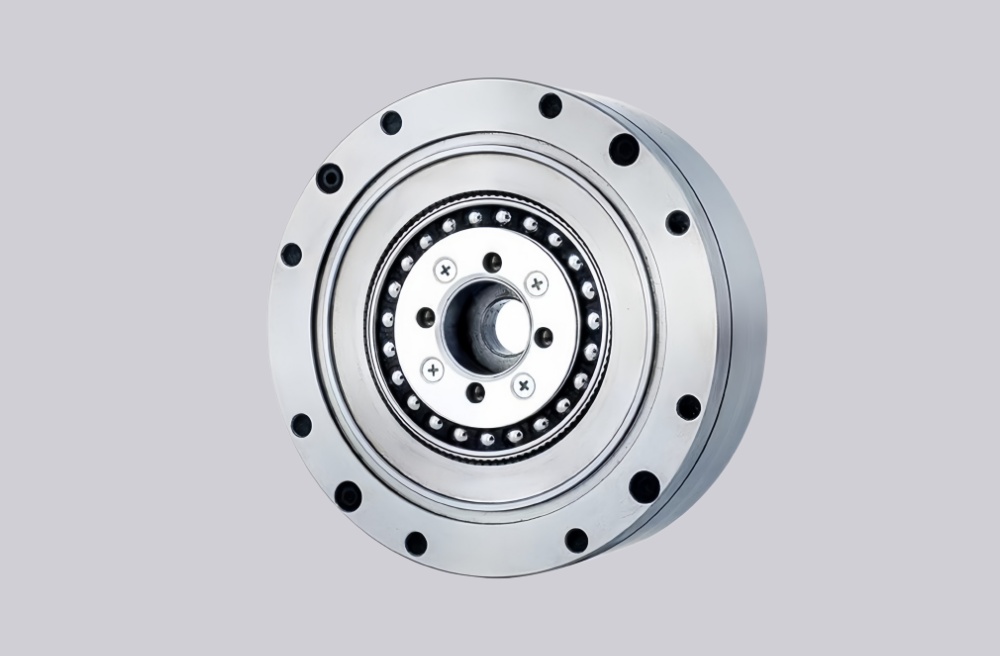
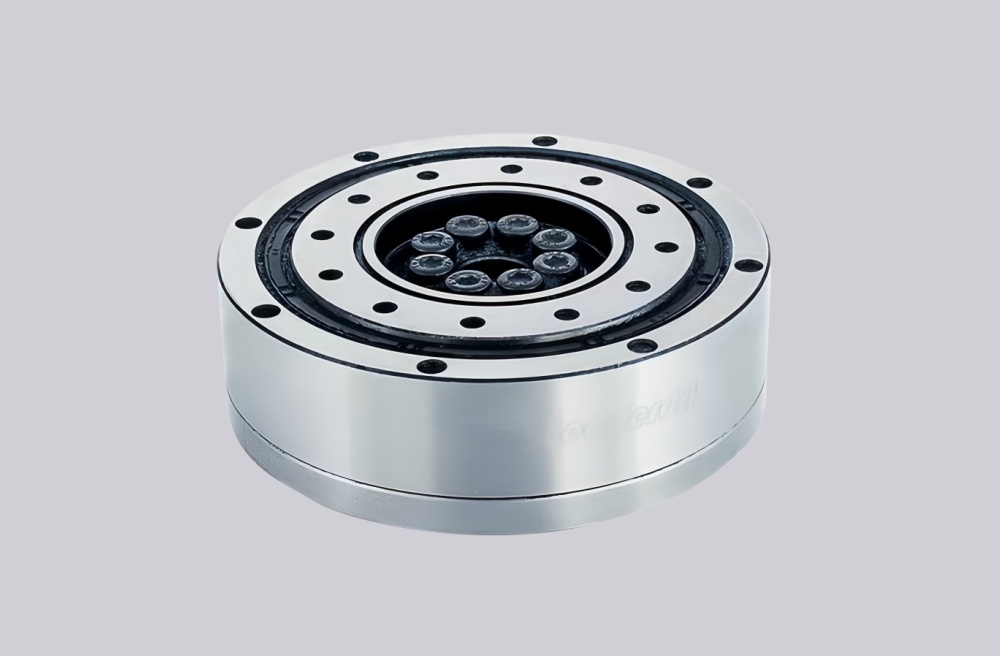
减速机(行星减速机)方面,关键参数包括传动比、背隙、额定输出扭矩、效率以及工作温度范围。背隙越小、传动效率越高、结构越紧凑,系统的刚性和响应就越稳定。选型时还要考虑热管理与润滑条件,以及装配公差对刚性的影响。最终目标是实现一个“刚性够用、响应足够快、热稳定可控”的组合,而不是仅仅追求某一个单点指标的极端值。
控制策略方面,可以通过细化的前馈与闭环参数来实现快速收敛:合适的增益、积分时间与微分时间可以降低超调,提升稳态误差的可接受水平。结合高分辨率编码器和合适的滤波器设计,系统更容易在负载扰动下保持定位稳定。要点在于逐步提升刚性与响应,而不是一蹴而就地让系统承受极限工况。
对于热问题,建议建立热模型并设置热闭环保护,确保长时间运行中的温升不会使零部件热膨胀超出位移裕度。若遇到噪声与齿轮啮合异常,需检查润滑油的粘度与寿命、联轴器的对中以及轴承的磨损情况。
通过数据驱动的优化,企业可以在保持高效运转的进一步缩短调试周期、降低维护成本。将传统传动与先进控制融合,是实现高端制造核心竞争力的关键路径。
在新项目初期就建立系统级仿真模型,评估惯量比、热负荷与定位精度之间的关系。选型时以“刚性与响应的综合指标”为基准,兼顾热管理与寿命需求。安装阶段强调对中、对线与润滑条件,必要时采用预紧力/预载设计来提升刚性。调试阶段循序渐进,先空载后有载,逐步提高闭环增益,确保稳态与瞬态表现都在可控范围。
通过以上要点,可以把伺服电机与行星减速机的搭配从概念阶段推向高效、可重复的工程实践,真正实现系统刚性与响应精度的双提升。
美卡普减速机
电话微信:+86 158-5032-2957