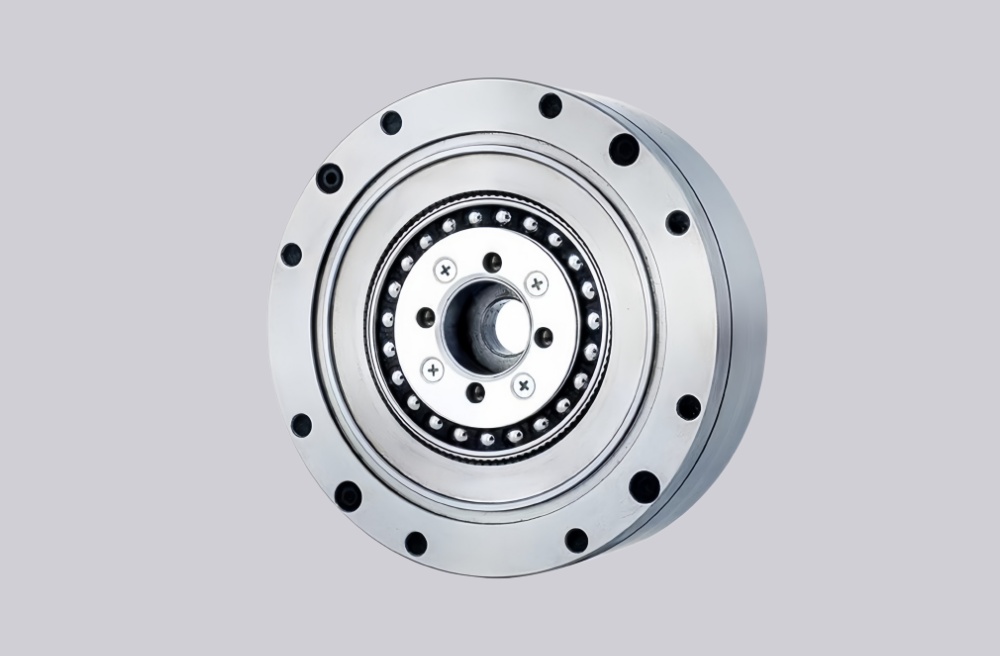
谐波减速机以柔性波动变形为传动基础,通常由三大部分组成:柔轮(flexspline)、刚轮(realspline)以及波发生器(wavegenerator,通常是偏心轮或凸轮机构)。工作时,波发生器偏心地驱动柔轮产生周期性波形,使柔轮和刚轮之间发生啮合位移与弹性变形,从而实现高比值的减速。
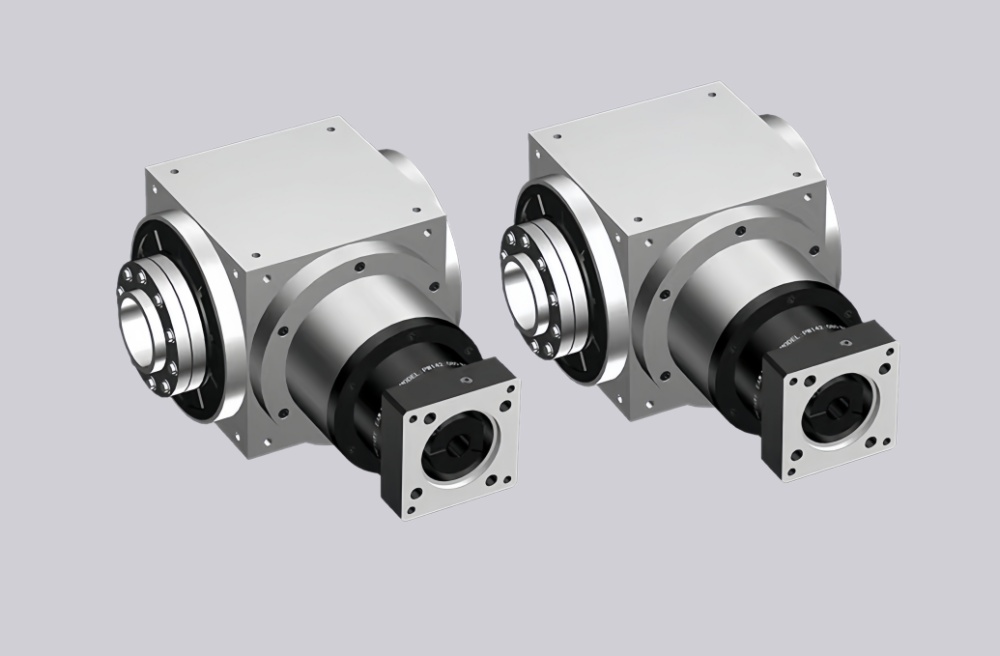
这种结构使得单级减速比可以达到较高的数值,体积小、重量轻,理论上背隙极小,定位精度竞争力十足,适合对产出位置要求极高的场景。与之相对,行星减速机以“太阳齿轮—行星齿轮组—内齿轮(环齿轮) 载体”为核心结构,类似于多级齿轮的集合体。多齿轮的啮合会把扭矩逐级分配,提供较高的载荷承载能力和结构刚性,单位体积的扭矩密度通常高于谐波结构。
该类减速机的核心部件包括太阳齿轮、行星齿轮组、环齿轮和载体,常以一到多级组合实现所需总传动比,并可集成制动器、编码器等辅助部件,便于实现闭环伺服控制。由于啮合件都是刚性齿轮,机械磨损以接触疲劳为主,整体更易实现高温工况下的可靠运行和较长寿命。
两者在结构端的差异,直接决定了后续在载荷能力、背隙控制、热管理与维护需求上的不同。
二、工作原理与结构对比从工作机理看,谐波减速机通过柔性构件的弹性变形来实现啮合与传动,波发生器的偏心运动使柔轮在圆周方向形成“波段”,从而逐步啮合、传递扭矩。这种方式的最大优势在于极低的背隙和极高的定位精度,以及紧凑的外形。另一方面,行星减速机的传动是通过刚性齿轮的啮合与力矩分配实现的,具备更强的承载能力、良好的热稳定性和较高的运行可靠性。
轴向与径向的承载能力在行星机构中通常较强,结构刚性也使其对冲击载荷的耐受性更好。由于谐波结构中的柔性元件存在材料和加工工艺的约束,其对径向载荷的承载能力通常不如同等级的行星减速机来得强,且对污染、润滑条件较为敏感。与此谐波减速机的减速比往往可以通过单级实现较大的数值,但对于高热环境和高频振动场景的耐受性需要额外设计来提升。
综合来看,二者在结构选择上各有侧重点:谐波强调高传动比、轻量化和高精度;行星强调高载荷、强鲁棒性和热稳定。
三、背隙、重量与体积的结构特征背隙是衡量定位精度和回位性能的关键指标。谐波减速机由于没有传统的齿间间隙结构,而是通过柔性变形实现啮合,因此理论上背隙极小,常被称为“零背隙”或近零背隙。不过实际应用中,背隙也受材料疲劳、润滑与温度等因素影响,需要通过正确的润滑与预紧来控制。
对于行星减速机,若采用多级齿轮啮合,背隙虽然可以通过预紧、制造公差控制和装配调整来降低,但相对而言,仍会存在一定的机械间隙,尤其在低速高扭矩运行时更为明显。重量与体积方面,谐波减速机以其独特的柔性元件和紧凑的外形,通常在同等传动比下显著更轻巧、体积更小;而行星减速机的整体结构需要容纳多个齿轮、载体和外壳,单位扭矩下的重量通常更大,但其刚性与承载能力也随之提升。
对于需要在有限空间内实现高精度定位的机器人关节,谐波减速机的体积与重量优势往往成为设计首选。但在需要承受较大载荷、工作环境温度波动明显或者对动载冲击敏感的工业场景,行星减速机凭借其结构刚性与热管理优势更具竞争力。
四、应用场景的初步导向从应用导向来看,谐波减速机适合对定位精度、响应速度和重量有极高要求的场景,如微创手术机器人、精密坐标定位、柔性机器人关节等。这些应用需要极低背隙、快速的响应以及小体积设计,且常以高精度伺服电机为驱动,整体系统对噪声和振动也有严格要求。
相对地,行星减速机广泛应用于对载荷、耐冲击和长期稳定性有高要求的环境,例如工业机器人关节承载、机床主轴驱动、重载自动化生产线及航空航天领域的某些大转矩组件等。设计者在选择时往往要综合考虑系统成本、维护便利性、可用空间以及热管理等因素。若需要高性价比的高扭矩级联,且对定位精度要求并非极端苛刻,行星减速机往往是更务实的选择;若目标是极致的定位精度、极低的背隙以及轻量化设备,且工作环境对径向载荷能力容忍度较低,谐波减速机更具吸引力。
五、选型要点与综合判断在早期的系统设计阶段,工程师应结合以下要点进行权衡:一是需求的定位精度与背隙要求;二是最大工作扭矩、载荷冲击和热管理能力;三是系统尺寸、重量与安装空间;四是成本与维护成本。若目标是实现高传动比且对重量与体积有严格限制,同时愿意接受相对较高的单位成本与较低的径向载荷支撑,谐波减速机是理想选择;若目标强调高载荷能力、长期可靠运行、简化维护并具备较好的热稳定性,那么行星减速机在性价比和鲁棒性方面通常更具优势。
特别是在复杂机械臂、协作机器人等应用场景中,很多设计师会采用混合组合策略:在一段对定位精度要求极高的关节处,使用谐波减速机作为伺服驱动的核心执行元件;在承载较大、需要较强冲击耐受的连杆处,采用行星减速机以分担载荷并确保系统稳定性。通过这样的分段配置,可以兼顾高精度与高可靠性,提升整机性能的同时控制成本。
三、性能对比:扭矩、效率、寿命与热管理在具体性能指标方面,谐波减速机的最大亮点在于极低的背隙、极高的定位精度以及紧凑的体积。单级高减速比意味着可以用更少的部件实现同等甚至更高的传动比,这对于要求快速闭环控制的精密定位系统尤为关键。
谐波减速机对径向载荷的承载能力通常较低,且柔性元件对润滑、污染和温度变化敏感,因此热管理和环境控制在设计阶段需要格外注意。传动效率方面,谐波减速机在理论上和实际应用中通常呈现出较为稳定的效率,但在高扭矩、低速工况或高频振动条件下,因弹性变形和内摩擦的影响,效率可能出现下降。
寿命方面,柔性元件的疲劳寿命会成为关键因素,若工作循环频繁、环境恶劣,需通过润滑剂选择、密封设计和热管理来延长寿命。相对而言,行星减速机在同等级扭矩下通常具有更高的载荷承载能力和更好的热分散性,结构刚性强,耐冲击和长期运行的鲁棒性较优。效率方面,现代高品质行星减速机在额定工作条件下往往具有更高的传动效率,热管理能力也更易通过散热路径优化实现。
背隙方面,行星减速机也可通过多行星轮组合、精密加工与预紧控制来降低,但与谐波相比,往往不具备同等级的“零背隙”特征。综合而言,若以单项指标比较:谐波减速机在定位精度与重量/体积优势明显,行星减速机在载荷能力、热稳定性和长期运行可靠性方面更为突出。
四、应用场景深度解析与选型策略在不同应用场景中,选型策略应以系统目标为导向,而非单一指标的极端追求。对于需要极高定位精度、极低背隙且工作重量受限的机器人关节、微型装置或手术机器人等,谐波减速机往往可以提供更优的角度重复性和更低的动态误差,有助于提升闭环控制的稳定性与响应速度。
但需要权衡的是,这类系统对热管理、污染控制和润滑体系的要求更高,且初期采购成本通常高于常规行星减速机。反之,对于需要长时间稳定运行、承载能力强、对冲击有较高耐受力以及对成本敏感的工业自动化、数控机床主轴或大型机械臂等场景,行星减速机凭借其结构刚性、耐久性和散热优势,往往是更稳健的选择。
举例来说,在高拍扭矩与快速响应并存的场景,设计师可在关键关节采用谐波减速机以实现高精定位,在非关键承载节点使用行星减速机来提供强鲁棒性和寿命保障,这种混合化、分区式的配置能显著提升整机的性价比与可靠性。
五、总结与市场趋势展望综合上述对比,谐波减速机与行星减速机并非简单的“谁更好”,而是在不同工况下各自的优势与局限。谐波减速机以极低背隙、紧凑结构及高精度为核心竞争力,成为对定位与轻量化有极高要求的应用首选;行星减速机则以高载荷能力、良好热管理和长期稳定性著称,是对鲁棒性和性价比要求较高场景的理想选择。
未来的技术趋势可能包括材料科学的进步带来更高强度的柔性元件、制造工艺对公差控制的进一步提升,以及新型润滑与密封技术对寿命与可靠性的再提升。越来越多的系统将采用混合式配置,将两种减速机的优点结合起来,以实现更广泛的应用覆盖与成本效益。对于企业与设计师而言,建立基于真实工况的仿真与试验平台,将有助于在设计阶段就做出最优的选型决策,从而实现更高的生产效率、更精准的控位性能以及更稳健的长期运营。
美卡普减速机
电话微信:+86 158-5032-2957