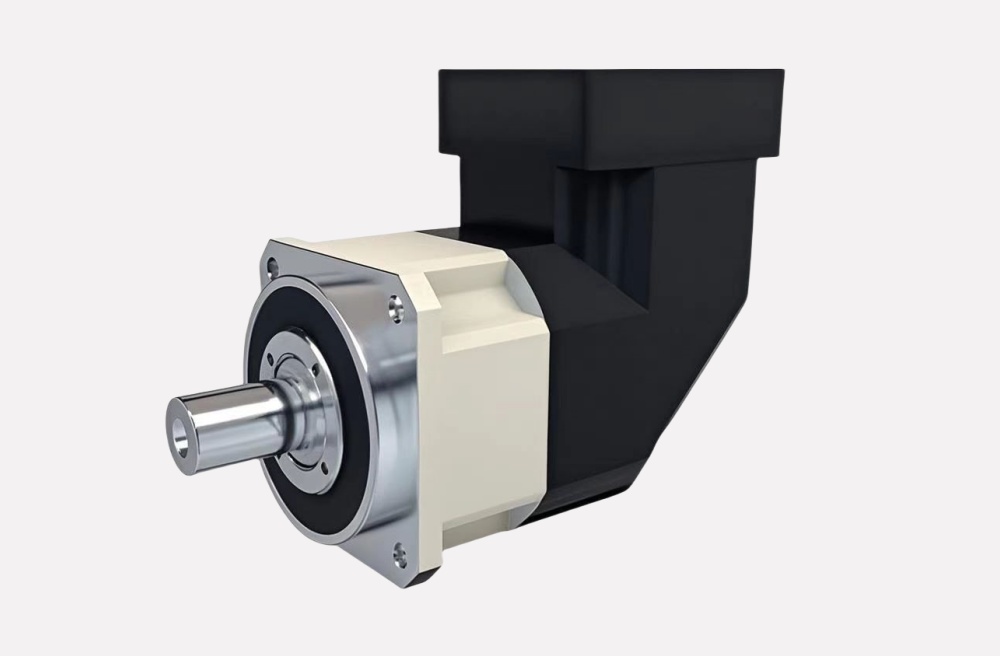
本文深入探讨协作机器人减速器选型中的背隙与刚性需求,帮助您掌握如何在精准与灵活之间找到最佳平衡点,确保协作机器人在实际应用中能够发挥最大效能。
© 昆山叁壹文化工作室所有 网站地图 苏ICP备2022036425号-13