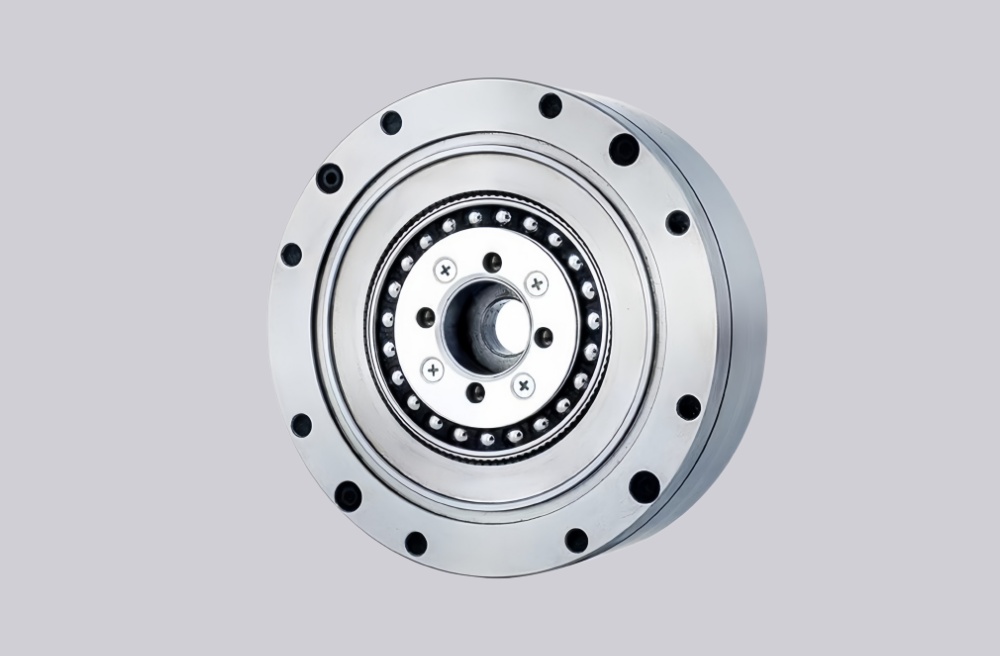
其核心在于行星齿轮布置的紧凑性:太阳齿轮带动多组行星齿轮同时啮合,输出端通过外圈齿轮传动,整体占用空间远小于同等减速比的直齿式传动。如此设计带来扭矩密度的显著提升,单位体积内可输出的力矩更加可观,特别适合机器人末端执行器、微型机械手和医用微系统等对体积敏感的场景。
紧凑不仅来自传动比的提升,还来自高效的集成化布局。微型行星减速机往往将电机轴、耦合、编码器、润滑及密封等子系统以模块化方案整合在同一机身内,减少外部连接件和安装孔位,从而降低系统重量与安装时间。其轴向高度较低、输入输出轴线对齐好,使得在有限腔体中也能实现高扭矩传输和精准定位。
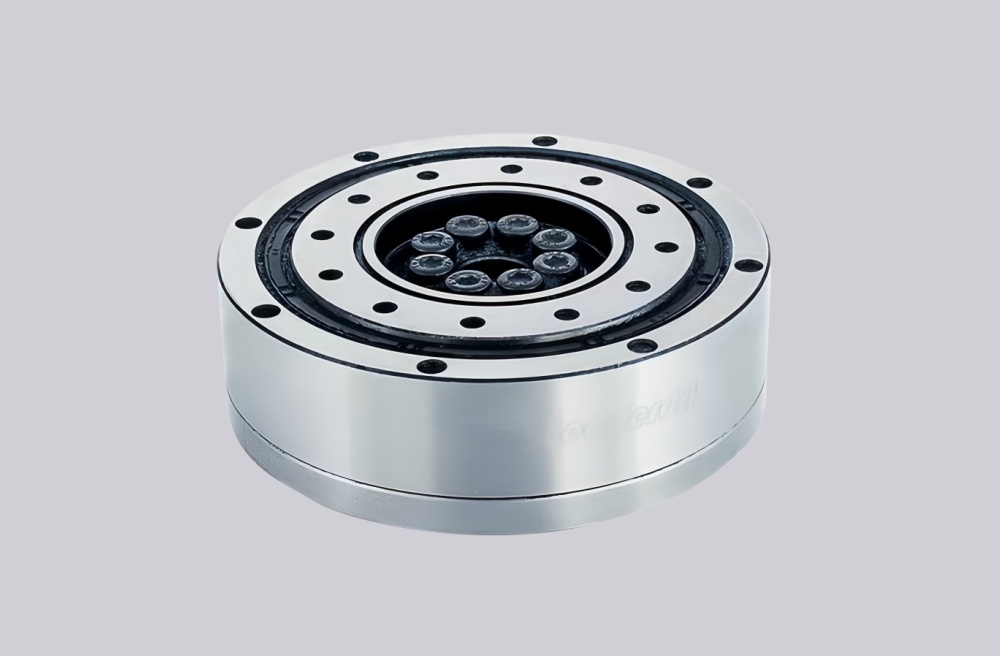
高精度的齿轮加工、公差控制以及高性能润滑体系共同作用,确保低背隙和低运行噪声,从而在高精度运动控制中保持稳定性。热管理方面,小体积带来的热集聚往往成为挑战,但微型减速机的结构设计通过优化轴向与径向布置、密封润滑的选择与散热路径设计,改善热分布,避免热点积聚,延长使用寿命。
材料选择方面,轻量化高强度材料、表面硬化处理与低摩擦系数的润滑组合,也使得摩擦损耗降低、温升减缓。维护方面,模块化设计和标准化接口让交换部件更便利,润滑周期更易预测,故障诊断也可以通过简单的集成传感器实现。未来应用的灵活性则来自可定制化的接口和多样化的输出轴配置。
无论是微型机器人关节、精密夹爪还是医用探头的驱动,设计师都可以通过选择不同齿轮比、材料、涂层和封装方式来实现所需的扭矩、响应速度与耐久性。紧凑设计的核心在于:在极小的体积里,借助行星齿轮组的高效传动、模块化集成与高可靠性润滑,实现高扭矩密度、低背隙和易维护的综合优势。
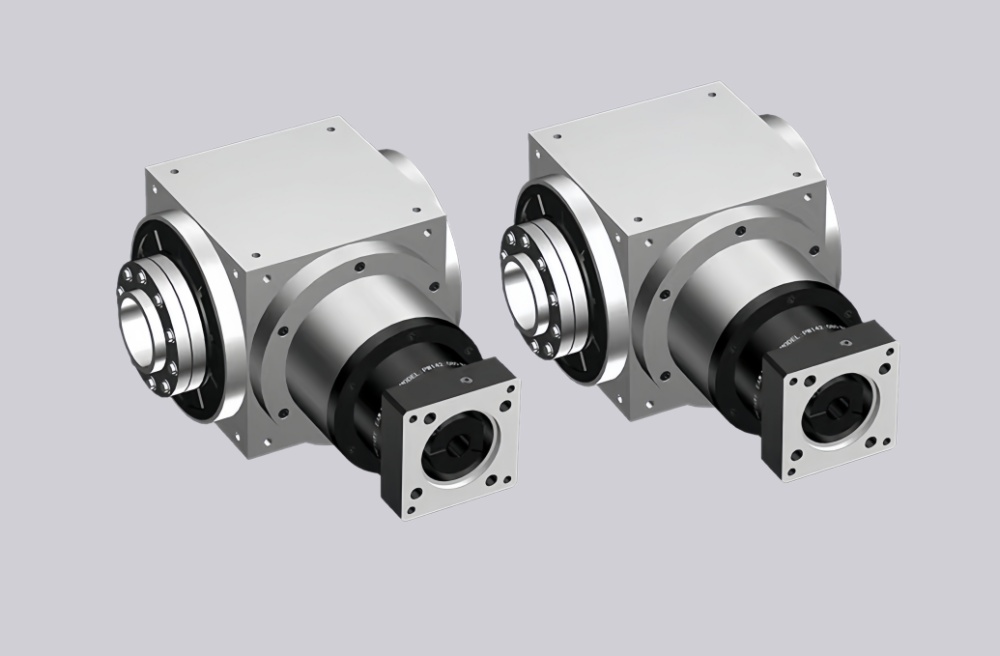
二、在机器人与医疗领域的创新应用在机器人领域,微型行星减速机以其紧凑的体积与高扭矩、低背隙特性,成为微型关节、手臂驱动和灵巧抓取的理想选择。其高精度与快速响应使得末端执行器能够实现微小位移的重复定位,支持高精度装配、微创操作辅助以及协作机器人中的细致操控。
结合高分辨率编码器、力/力矩传感与闭环控制,这类减速机构能够在亚毫米级实现稳定的定位、重复性以及可预测性,从而提升整机的工作质量和可靠性。模块化的结构还让多轴系统的集成变得更简单,降低系统集成难度和总成本,支持快速迭代与定制化的机器人解决方案。
在医疗领域,设备对体积、重量和清洁度的要求尤为苛刻。微型行星减速机的紧凑化设计使内镜系统、微创手术工具、药物输送泵、康复与监护设备等获得更强的集成能力。耐腐蚀涂层、无菌封装、耐高温消毒能力等特性,使其能够在临床环境中维持稳定性能与长寿命。低噪声、低振动的运行特性有助于提升医疗场景中的舒适性与安全性,如在长时间监护、康复训练以及无创检测等领域。
通过对齿轮比、材料、润滑及密封方案的综合优化,医疗设备能够在高可靠性和低维护成本之间取得良好平衡。
在设计与应用层面,工程师可利用传感器网络与诊断算法实现预测性维护,降低设备突发故障风险。对于需要远程维护的设备,轻量化、模块化的驱动单元便于远程诊断与更换;对于机器人系统,模块化减速单元可无缝对接多轴运动控制平台,提升系统的可扩展性与适配性。
未来趋势包括AI辅助的运动控制、自适应扭矩管理、以及材料科学与传感器技术的协同发展,以实现更高的定位精度、更长的使用寿命和更低的能耗。简言之,微型行星减速机在机器人与医疗领域的应用潜力,正在以极致的小型化推动操作自由度和系统集成的创新组合。
美卡普减速机
电话微信:+86 158-5032-2957