行星式齿轮减速机因其独特的齿轮布置,常被视为高扭矩密度与高刚性的代名词。然而市场上还有圆柱齿轮减速机、蜗轮蜗杆、伺服减速机等多种方案,各有侧重。本部分从结构原理、核心性能与成本维护的维度,带你建立对不同类型减速机的直观认知。
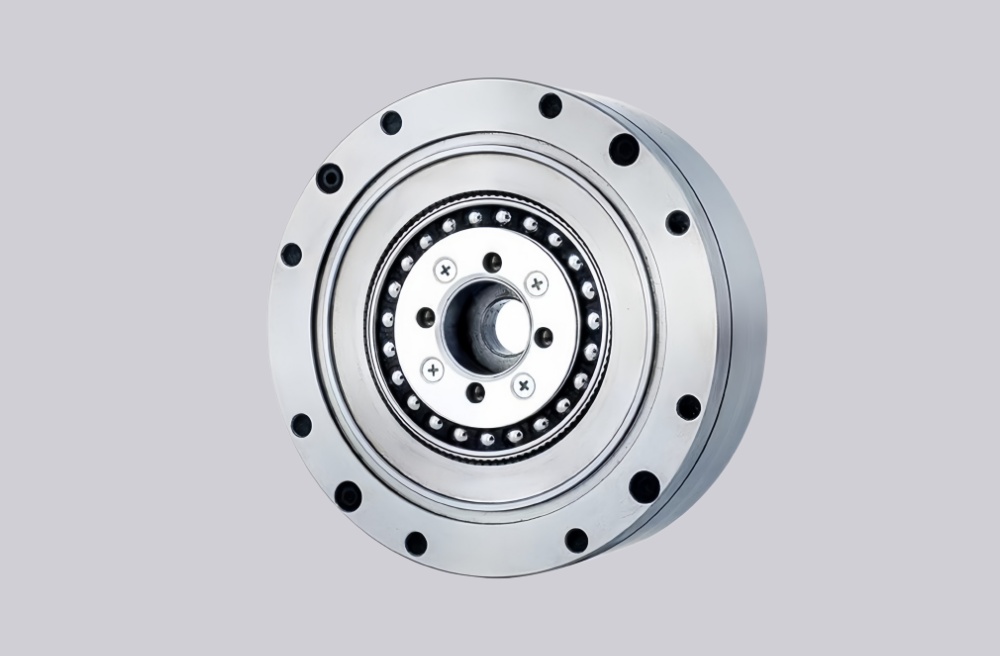
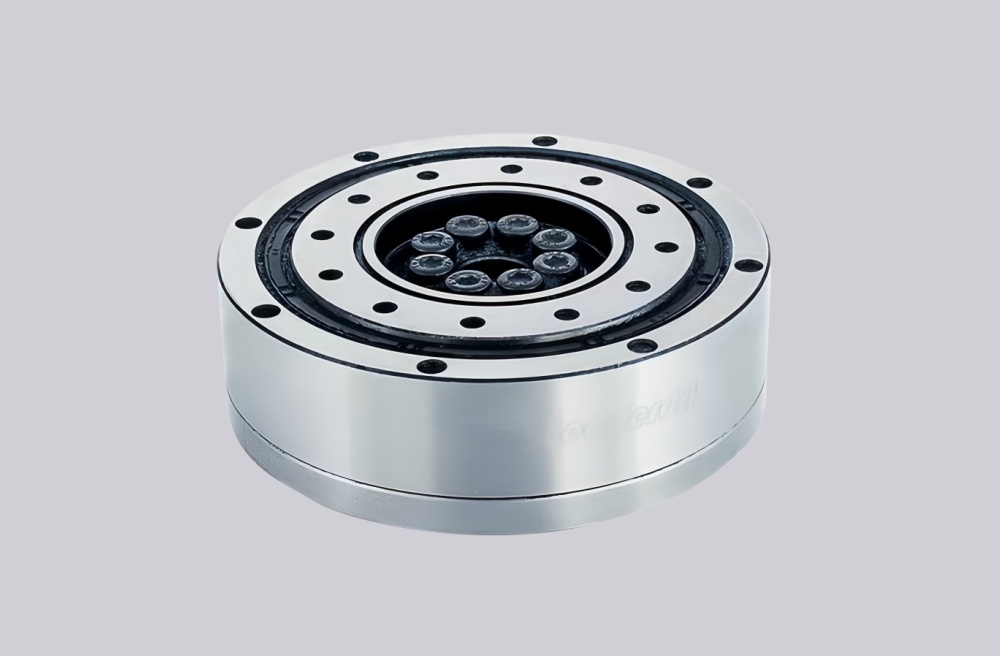
一、结构与工作原理的直观对比行星式减速机以一个太阳齿轮、数个行星齿轮以及外环齿轮构成闭合的齿轮系,负载在多对齿轮间分担,力矩被均匀分布。这样的布置使单位齿轮承载较低、接触强度高、热量分散效果好,因而在高载荷场景中表现突出。相较之下,圆柱齿轮减速机多采用直线序列的齿轮啮合,结构简单、维护较易,体积往往更大、在同等功率下扭矩密度略低。
蜗轮蜗杆则通过滚动与滑动的组合实现大减速比,优点是传动平顺、噪音低,但效率通常低于行星式,热量积累和润滑要求也较高。伺服减速机强调高定位精度与快速响应,常以模块化、数字化控制为特征,价格通常高于普通减速机。
二、核心性能差异的要点传动效率方面,行星式在中至高转速条件下通常具有较高的综合效率和扭矩密度,特别是在同等外形约束下输出功率更大。蜗轮蜗杆在极低噪声和陡降速比场景有优势,但其摩擦损失和热管理要求显著,长期运行成本需关注。成本方面,行星式减速机的制造和装配复杂度高,单件成本上升,但通过模块化、批量化制造,单位成本可被压低;圆柱式更具成本竞争力,装配简单、维护快速。
背隙与刚度方面,行星式由于多对齿轮啮合,整体刚性更高、背隙更小,定位精准度更易达到重复性要求;伺服减速机在极高精度与高速响应方面具备优势,但价格和维护成本也相对较高。热管理方面,行星式机制载荷分布均匀、热点区域集中度低于单一大齿轮设计,适合连续运转和高功率密度场景。
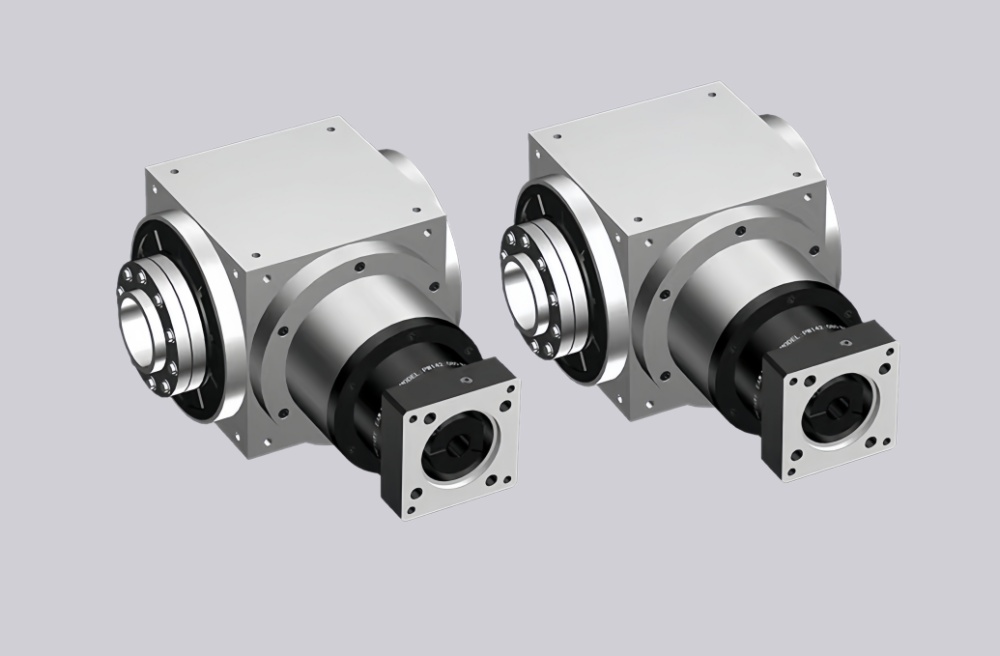
三、装配、尺寸与维护的现实差距紧凑外形是行星式的一大卖点,尤其在机器人、自动化分拣、机床主轴等空间受限的场景中,能以较小的体积输出较大扭矩。但这也对系统的传动路径和振动控制提出更高要求,避免共振和不对称载荷导致寿命下降。圆柱式减速机以线性、模块化的结构著称,维护便利、替换件易购,成本优势明确,适合对成本敏感且载荷相对均匀的场景。
蜗轮蜗杆的密封、润滑和热管理尤为重要,长期运行需关注磨损与热疲劳。伺服减速机则更强调定位重复性和控制协同,其维护点集中在伺服驱动与控制系统的协同调校上。综合来看,若目标是在有限空间内获得高刚性、高负载能力与良好热管理,行星式通常是优选;若追求成本最优且装配、维护相对简单,圆柱式具备明显优势;若需要极高定位精度、快速响应与数字化控制,伺服减速机的综合价值更具吸引力。
四、初步场景指向的判断行星式减速机在需要高扭矩密度、紧凑外形和高刚性的场景尤为出色,常见于机器人关节、机械手、自动化装配线和高端数控设备的主驱动阶段。圆柱式则在成本敏感、结构简单、维护频次低的场景中具有明显优势,如一般输送、泵类驱动和简单传动系统。
蜗轮蜗杆更适合低速大减速比、低噪音要求且热管理条件允许的场景,但在高频率运转时需权衡效率与散热。伺服减速机则是定位精度和动态响应要求极高的场景的首选,常见于高端机器人、精密机床和伺服驱动系统的核心传动部分。
Part2的目标是把前面的认知落地到具体应用场景、选型要点和案例分析,帮助读者在实际采购中快速做出决策。
一、从需求出发的选型框架要点十条:输出扭矩、可接受的背隙与刚度、目标转速区间、系统总长与安装空间、环境条件(温度、粉尘、湿度)、润滑与密封要求、维护周期与零部件替换难易度、成本预算、供应商售后能力、与控制系统的兼容性。把这些要素串起来,能迅速筛选出“优先考虑行星式”还是“更偏向圆柱式/伺服减速机”的方向。
二、不同减速机类型的适用场景要点
行星式减速机:高扭矩密度、优良刚性、紧凑体积,适合机器人关节、协作机械、机床主轴驱动、传动轴集中控制的多轴系统。圆柱式减速机:成本友好、结构简单、维护便利,适合输送、泵类、通用机械的初级驱动或系统对精度要求不极端的场景。蜗轮蜗杆减速机:低速高减速比、传动平稳、噪音低,但效率相对较低,适用于对速度要求较低但减速比需求很大的应用,如某些包装机械的末端驱动或特殊低速装置。
伺服减速机:定位精度和动态响应要求极高的场景,如高端机器人关节、数控机床主轴、快速定位系统,成本与维护投入也相对较高。
三、选型流程与实用清单1)明确工艺参数:目标扭矩、实际载荷周期、最大/最小转速、允许的背隙与振动。2)分析工作环境:温度、灰尘、水汽、污染物等对密封与润滑的影响。3)评估维护与备件:厂家服务网点、交货周期、备件可得性与保修条款。4)设置预算与寿命期望:初始成本、能耗、维护成本、备件成本的综合评估。
5)与控制系统对接:信号兼容性、控制精度、反馈回路的协同设计。6)最后做对比原型测试或仿真验证,确保在实际工况下满足性能指标。
四、案例分析与落地要点
案例A:某协作机器人关节需高刚性与紧凑空间,选用行星式减速机与伺服驱动的组合,结果是扭矩密度提升、响应速度提升、系统振动控制更好,适合高频率小角度转动。要点:优先考虑高扭矩密度与高刚性组合,注意热管理与控制协同。案例B:某自动化输送线低成本驱动,采用圆柱式减速机,达成稳定运行与可维护性优势,成本显著下降。
要点:在非高精度定位需求下,圆柱式具备最大性价比。案例C:某数控机床主轴驱动需要极致定位与快速响应,选用伺服减速机方案,配合闭环控制,实现高重复定位性与动态性能。要点:定位精度与控制系统的整合是成败关键,前期应进行系统级的匹配与测试。
五、快速决策模板
需要高扭矩密度且空间受限时:优先考虑行星式减速机,结合高刚性伺服驱动方案。关注成本与易维护的场景:优先选圆柱式减速机,确保备件供应充足。对定位精度与动态响应要求极高:优先考虑伺服减速机或带伺服控制的行星式方案,确保控制系统兼容性与稳定性。
总结将两种分支信息合并看,行星式减速机以其锁定的高扭矩密度、良好刚性和紧凑性,在机器人、机床与高端自动化设备中具备明显竞争力;而圆柱式在成本与维护上具有不可替代的优势,蜗轮蜗杆在极低速高减速比场景仍有市场定位,伺服减速机则是在高精度控制领域的强力选手。
最终的选型,取决于系统的综合需求与长期运营成本。希望本两部分的对比与实操框架,能帮助你在工程实践中做出更明智的决策。
美卡普减速机
电话微信:+86 158-5032-2957