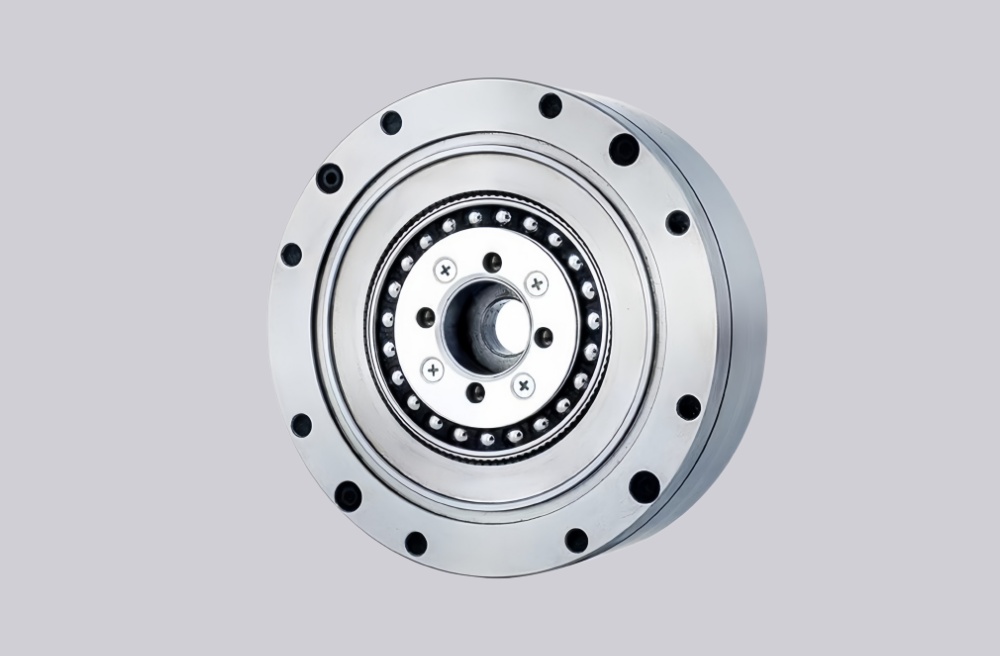
一、基础原理与快速计算思路行星减速机由太阳齿轮、行星轮和环齿轮组成,在同一模数与同一节圆上啮合。减速机的速比本质是输入端与输出端的角速度之比,不同的固定件会改变传动关系。在工程应用中,最常见且直观的场景是环齿轮固定、太阳齿轮作为输入、星轮载体作为输出。
快速计算的步骤,便于现场或设计阶段直接落地:第一步,明确输入端、输出端以及固定件。最常用的场景是“环固定、日输入、载体输出”;若固定件改变,速比公式也会随之改变,需要重新确立等效关系。第二步,获取齿数数据。记录太阳齿轮的齿数Zs、环齿轮的齿数Zr。
若涉及多级级联,需要对每一级分别计算后相乘。第三步,将数据代入合适的公式,计算速比i。若输入速度为nsun,输出速度为ncarrier,则ncarrier=nsun/i。第四步,进行简单验证。通过已知输入速度和算出的速比,反算输出速度,看是否与公式结果吻合;若有误差,检查齿数是否正确、固定件选择是否一致、单位是否统一。
实例1演示(单级、环固定、日输入、载体输出):设Zs=20,Zr=60。若太阳齿轮以1200rpm驱动,环齿轮固定,则速比i=1 Zr/Zs=1 60/20=4。输出星轮载体的理论转速为n_carrier=1200/4=300rpm。
注意方向性,一般设定为同向的参考,但实际机械结构的传动方向可能因为安装而有所偏差,需要在制图或现场标注清晰。
多级设计的核心在于速比的叠乘。若两级均采用相同的环固定配置,一级速比i1=1 Zr1/Zs1,二级速比i2=1 Zr2/Zs2,总速比itotal=i1×i2。举一个简单的并联串联例子:若Zs1=20、Zr1=60得到i1=4;Zs2=25、Zr2=80得到i2=1 80/25=4.2,则itotal=4×4.2=16.8。
输入端若为第一阶段太阳齿轮,输出端为第二阶段星轮载体,总转速将等于输入转速除以16.8。此时,设计师可以通过逐级计算、逐级验证,确保整机的整体验证一致。
关于常见的实际情况,速比不仅影响转速,还与传动效率相关。理论速比是设计起点,实际工况下的转速还会受到润滑、背隙、温度、载荷波动等因素的影响。因此,在设计初期就应留出裕量,并考虑容错与调整空间。Part1的要点在于建立明确的输入/输出关系并掌握最常见的环固定场景下的基本公式,为后续更复杂场景和多级设计打好基础。
二、进阶演示、复合场景与常见错误分析1)场景扩展:输入为活动端(载体)而输出为太阳齿轮,环齿轮仍固定。若Zs=20、Zr=60,想要求解载体输入、太阳输出的速比icarriertosun,则icarriertosun=ωcarrier/ωsun=1/(1 Zr/Zs)=Zs/(Zs Zr)=20/80=0.25。
若载体以150rpm作为输入,太阳输出的理论转速为ωsun=ω_carrier/i=150/0.25=600rpm。这说明输入端和输出端的选择直接决定了速比的“大小”和“方向”(即谁是输入、谁是输出)。在实际选型与绘图中,请务必先把输入输出的节点标注清楚,避免把相同齿数、相同部件在不同工况下混用,从而导致错误的传动比与动作方向。
2)复杂场景:两级以上的复合行星传动。比如一个两级串联系统,第一阶段为Zs1=20、Zr1=60,第二阶段为Zs2=25、Zr2=80。若两级均以环固定,且输入端在第一阶段太阳齿轮,输出端在第二阶段星轮载体,总速比itotal=i1×i2,其中i1=1 Zr1/Zs1=4,i2=1 Zr2/Zs2=4.2,因此itotal=16.8。
这种乘积法则是多级行星传动最常用的计算方法。需要特别注意的是级间耦合:如果第二级的输入并非第一阶段的输出,而是直接由同一输入驱动,或是级与级之间采用不同的固定端,公式就需要重新推导或使用统一的矢量化约束来计算。
3)常见错误计算方式与避免要点
把环齿轮固定的前提混用到非固定场景,导致速比记错方向或误用公式。要分清“哪个端是输入、哪个端是输出、哪个是固定的”。速比写成放大比。工程中最常见的笔误是把4:1的速比记成0.25的放大比,导致控制系统设计错位。忽略多级耦合时的累积效应。
单级公式很容易被误用在多级场景,实际总比是各级比值的乘积,且需要确认输入端对各级的驱动关系。单位和符号不统一。转速单位通常用rpm,角速度用rad/s时需做单位换算,方向符号要与物理坐标系统一。忽略背隙、制造公差和润滑对实际转速的影响。
理论值往往高于实际值,尤其在高负载或高温工况下更明显。
4)现实世界的选型建议与服务支撑在实际工程里,速比只是性能框架的一部分。若你追求高稳定性与可预测性,除了正确的速比计算,还要关注传动效率、载荷能力、背隙、热膨胀以及振动特性等因素。为此,我们不仅提供标准化的速比计算工具,还能提供定制化的多级设计方案、误差分析与仿真验证服务。
若你希望快速得到可信的选型方案,可以利用我们的在线计算与咨询服务,得到从齿数选项、级数配置、到整体系统测试方案的全链路支持。通过把理论与现场工况结合,我们能够帮助你缩短设计周期、降低试制成本,并提升系统在实际条件下的转速与扭矩控制的可预测性。
这份两段式的讲解,覆盖了从基础原理到进阶场景的完整路径,并把常见错误点逐条列示,方便你在设计与选型时快速查漏补缺。如果你正在进行新机型的速比优化,或者需要对现有系统进行快速诊断,我们的专业团队和工具将成为你可靠的技术伙伴。
美卡普减速机
电话微信:+86 158-5032-2957