小标题1:市场需求与技术趋势在现代机器人行业,空间受限、载荷与精度需求并存,促使传动系统从单纯的减速功能向“高密度、低背隙、快响应、高可靠性”的方向发展。伺服直角行星减速机正是在这样的背景下走进了高端机器人系统的核心位置。这类减速机构将伺服电机的输入与输出轴以直角布置,显著缩小了安装占用的空间,降低了传动链路中的对中误差,减少了振动源头。
对于协作机器人(cobots)而言,柔性生产、贴近工作场景的可维护性与安全性成为关键指标;对于精密装配、半导体封装、医疗设备等领域,重复定位精度、抗振能力和热稳定性直接决定了产线良率与产品质量。市场对高刚性、低背隙、热稳定的直角行星减速机需求日益提升,厂商也因此把材料等级、加工工艺、装配预紧、结构刚性等作为产品差异化的核心要素来打造竞争力。
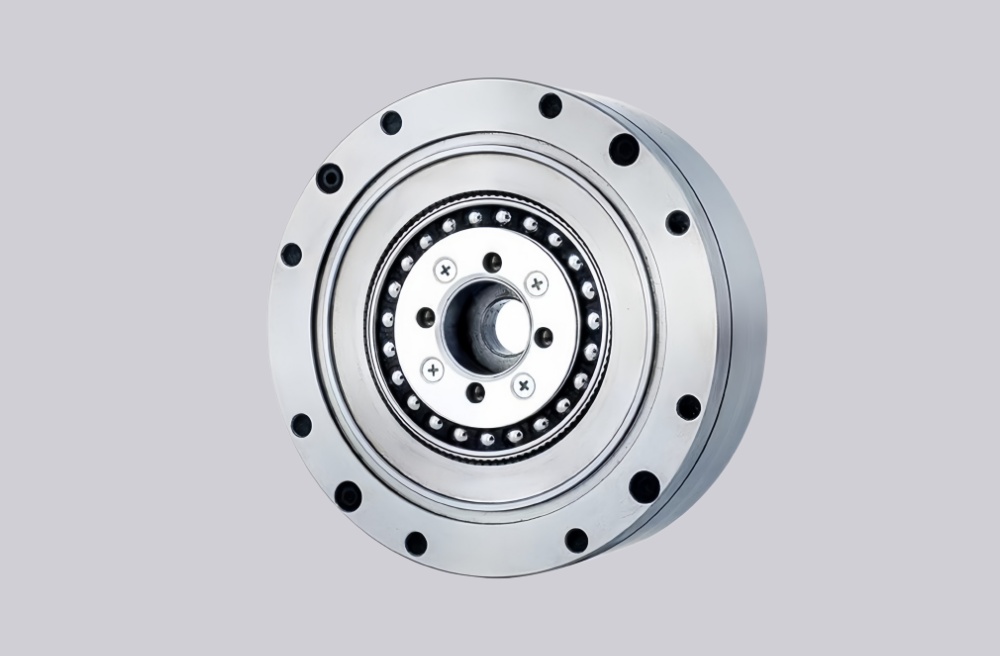
小标题2:伺服直角行星减速机的结构优势这类减速机以直角传动为特点,输入轴与输出轴呈90度交错,内部通过多级行星齿轮传动实现高减速比与高扭矩密度,体积与重量往往比同等力矩的直线输出减速机更具优势。核心优势体现在四个方面:一是高扭矩密度与紧凑外形,适合机器人关节的局部布置与靶向力控;二是背隙控制与刚性设计的协同,通过预紧、精密加工以及高强度材料组合,实现低Backlash,提升定位重复性;三是装配一体化设计,减少外部链接件与对中误差,提升传动刚性与热稳定性;四是热管理与润滑策略优化,降低热膨胀带来的尺寸漂移与润滑损失,维持长期稳定的传动特性。
综合来看,伺服直角行星减速机不仅能提供高精度的运动控制,还能在有限的机器人工作空间中实现更稳定、更可预测的性能表现。
小标题3:典型应用场景与效果在机器人关节、机械手臂的关节驱动、末端执行器的快速定位等场景中,伺服直角行星减速机的优势尤为明显。对于高周期、低容错的装配线,低背隙与高刚性带来的重复定位精度提升直接转化为良率的提高和停机时间的减少。在协作机器人中,直角布置降低了外部传动件的数量和安装需求,便于现场快速维护与更换,同时通过高刚性设计控制关节的弹性位移,提升人机协作中的安全裕度与响应速度。
对医疗机器人或微创手术设备等对稳定性要求极高的场景,稳定的热管理与低振动特性进一步降低了噪声与干扰,使复杂的路径追踪更加平滑。厂商通过对输入端马达的配合、输出端的耦合方式与结构件的刚性提升,能够实现更高的伺服跟踪精度、速度-精度的良好权衡,以及对工作环境温湿度变化的鲁棒性,从而在竞争激烈的机器人市场中提供更可靠的解决方案。
小标题1:高刚性设计的关键要素高刚性设计并非单一改进,而是材料、结构、加工与装配的系统性优化。在材料选择层面,使用高模量、高强度的齿轮钢、轴承座与外壳材料,结合热处理与表面硬化工艺,提升齿轮传动面的载荷承载能力与疲劳寿命。
在齿轮传动的几何和齿形优化方面,采用高精度的渐开线或修形齿形设计,以降低啮合误差对力矩传递的影响,减少齿轮啮合的周期性振动。再次,在预紧与装配公差管理上,施以可控的预载力与对中工艺,确保在工作温度范围内保持最小背隙与稳定的定位性。外壳与支撑结构方面,采用有限元分析(FEA)对整体刚性进行评估,优化连接面、对中孔及密封结构,提升系统模态频率,避免低频共振。
润滑与密封策略也不容忽视,合理的润滑方式与油膜厚度在保持低磨损的降低热膨胀引起的尺寸漂移。
小标题2:如何将高刚性转化为更高的运动控制精度刚性提升的最终目标,是实现更高的位置、速度与力矩控制精度。背隙控制与热稳定并重,降低位置漂移。在高刚性结构支撑下,控制系统可以更真实地反映执行器的物理响应,从而减少因机械弹性导致的超调和振动。
采用高级控制策略与传感融合,结合编码器、测速、力矩传感等多源信息进行闭环控制,结合前馈与自适应控制,提升跟踪精度与鲁棒性。第三,动态建模与仿真在设计阶段就显现价值,通过建立包括刚度、阻尼、热效应在内的多物理模型,预测在不同工况下的响应,并据此进行控制器参数调优与结构优化。
第四,振动抑制与抗干扰设计同样关键,如通过阻尼元件、结构改型与动力学被动/主动控制的组合,在工作频率区间抑制共振,提升高频响应的稳定性。第五,热管理成为“隐形的误差源”时刻需要关注,良好的热对齐与热分布均衡可减少热膨胀引起的相对位移,维持长期定位一致性。
系统集成层面,机箱、安装面、连接件的平整度与刚性要素也对最终的运动控制精度有直接影响,因此从设计阶段就应追求整机的一体化架构。
小标题3:互补技术与未来趋势未来趋势在于构建数字化与智能化的传动系统生态。通过数字孪生对伺服直角行星减速机的力学与热特性进行实时仿真与诊断,帮助预测性维护,降低非计划停机风险。材料与制造工艺的进步,如高强度合金的进一步开发、表面涂层的耐磨升级、以及高精度加工与装配自动化,将持续提升整体刚性与一致性。
传感端的进化也在推动精度提升,如在减速机中嵌入微型力矩传感、热电偶阵列和振动传感节点,实现更丰富的状态估计与故障诊断。机器人系统层面,驱动与控制的协同优化变得更加重要,控制架构从单一闭环转向多层次、分区控制与快速鲁棒自适应,结合云端数据分析与现场诊断,形成全生命周期的性能优化闭环。
对于用户而言,这些进步意味着设备在不同工况下的稳定性更强、寿命更长、维护更简便,最终体现在生产效率的提升与成本的长期下降。伺服直角行星减速机的高刚性设计,不再只是一个单元件的优化,而是机器人系统整体性能提升的关键支点。
美卡普减速机
电话微信:+86 158-5032-2957